小鹏G6电子架构与ADAS系统分析
来源:雷火电竞网页版登录 发布时间:2023-12-16 07:11:29
最近小鹏和问界的AEB测试非常引人瞩目,媒体的黑暗测试环境中,小鹏G6进行30km/h测试时,绝对没反应,直接撞上了假车,驾驶员踩下刹车才刹停;作为对比,问界M5 EV从30km/h到80km/h全部一次性成功刹停。实际上,问界M5并没有采用华为的S 2.0,问界M5采用的是博世的ADAS系统,阿维塔11才是华为的ADS2.0。
小鹏G6的前视双目并非华为那种立体双目,应该就是一个远距离摄像头,一个近距离摄像头。如果是立体双目,那么双目之间的距离至少也在8厘米之上,这个显然没有。小鹏的双目都是800万像素。
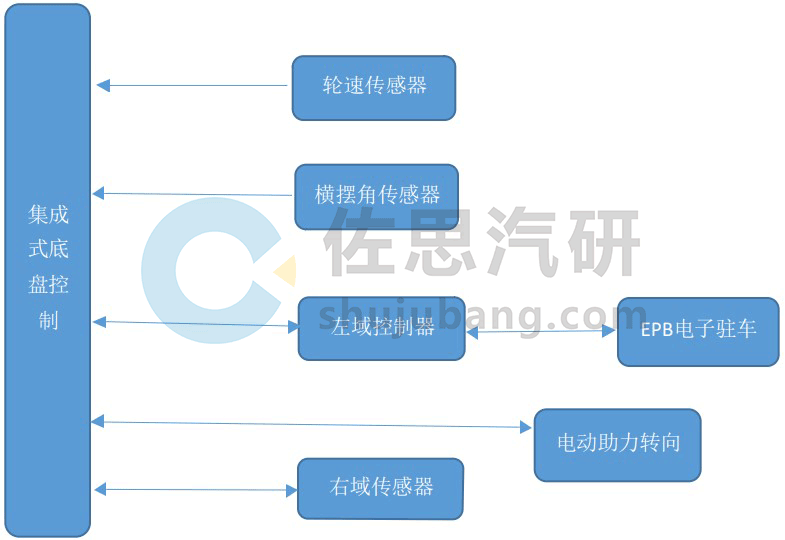
小鹏G6的电子架构与其他车厂最大区别是引入了左右域控制器架构,有点类似特斯拉的左右域控制器架构,实际上这算不得先进,只是将传统的车身域控制器按物理位置一分为二,分开的话,主要是节约线束成本,减少装配时间。
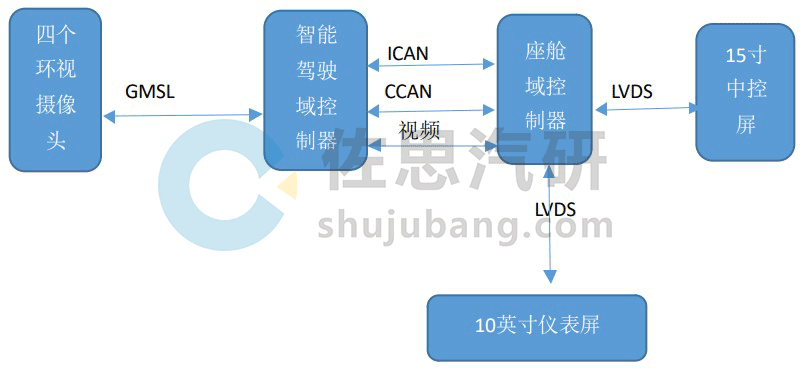
根据供的小鹏G6的电路图,我们大家可以大致分析出小鹏G6的电子架构。小鹏G6电路图的智能驾驶部分分别是中距离毫米波雷达、短距离毫米波雷达、盲区侦测系统、全景影像AVM系统、倒车雷达PAS系统、XPU系统、自动泊车系统。再根据小鹏G6的CAN总线分布图,能够准确的看出,小鹏将智能驾驶、座舱和中央网关集成在一起,称之为中央域控制器,这与蔚来的ES8非常接近,二者颇有点中央集中计算架构的意味,但这和真正的中央集中计算架构相差甚远,真正的中央计算架构是所有计算包括车身域的计算均由中央计算处理器负责,骨干网是超过10Gb的车载以太网,使用自适应AUTOSAR,每个区域Zone都只有控制MCU,这是汽车电子架构的终极模式,只有这样才可以实现真正的软件定义汽车,不过这种架构目前还未出现,估计要等到2027年量产车上才有机会出现。
虽然中央计算域包括了智能驾驶和座舱,但电路图上还是分开描述,这和蔚来ES8还是不一样,蔚来ES8从头到尾都未分开描述。
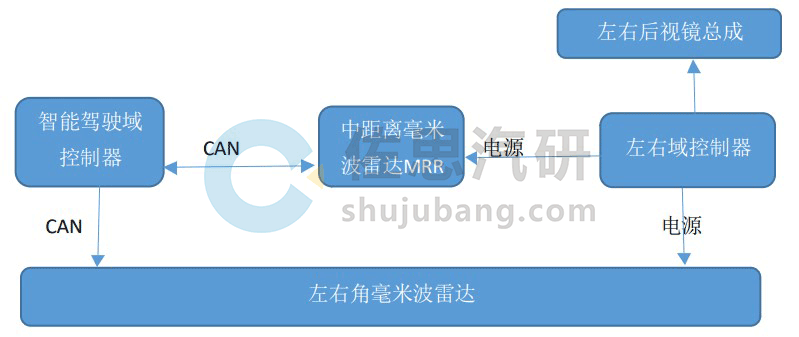
根据MRR的名字,不难猜测这非常有可能是博世的MRR中距离毫米波雷达,有效距离160米,国内几乎80%的车型包括问界M5都使用了这颗毫米波雷达,原因估计是性价比比较高。而左右域控制器只是供电,左控制器供应左侧雷达,右控制器供应右侧雷达,这就是传统的ECU,没有车载以太网,叫域控制器名不副实。
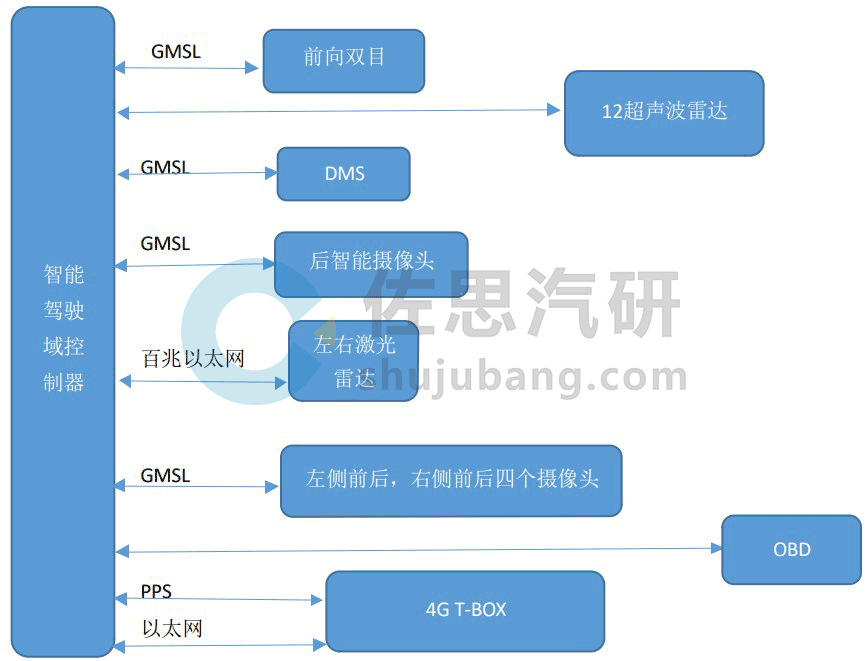
后智能是两颗摄像头,但是是一路输入,似乎是可以再一次进行选择输入。ADAS摄像头包括前双目、车身两侧四个摄像头、后摄像头、360环视,共11个摄像头,除前双目为800万像素,其余都是200万像素,还有一个车内的DMS摄像头。智能驾驶也负责自动泊车,是典型的行泊一体设计。
前大灯下是激光雷达,激光雷达是速腾聚创的MEMS激光雷达,安装的地方比较低,可以轻松又有效覆盖车身周围,而车顶激光雷达则有明显的盲区,速腾聚创几乎拿下了大部分中国车厂的激光雷达订单,除了理想、蔚来,其余厂家的激光雷达基本都是速腾聚创提供,包括比亚迪、极氪、广汽、上汽智己、小鹏、吉利路特斯,长城近期也从Ibeo转投速腾聚创。国际车厂中,丰田和Lucid也选了速腾聚创。比亚迪发布的百万豪车仰望U8,搭载3颗来自速腾聚创的激光雷达。
小鹏使用了双Orin做智能驾驶处理器,号称算力高达508TOPS,而问界M5是博世那一套,毫米波雷达与小鹏一致,视觉部分是博世的MPC3一体机,只有CAN输出,类似于Mobileye的黑盒子。
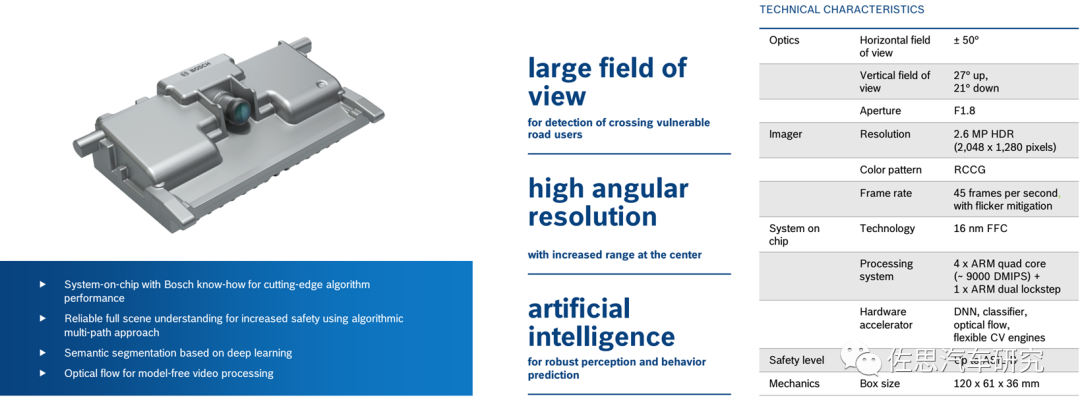
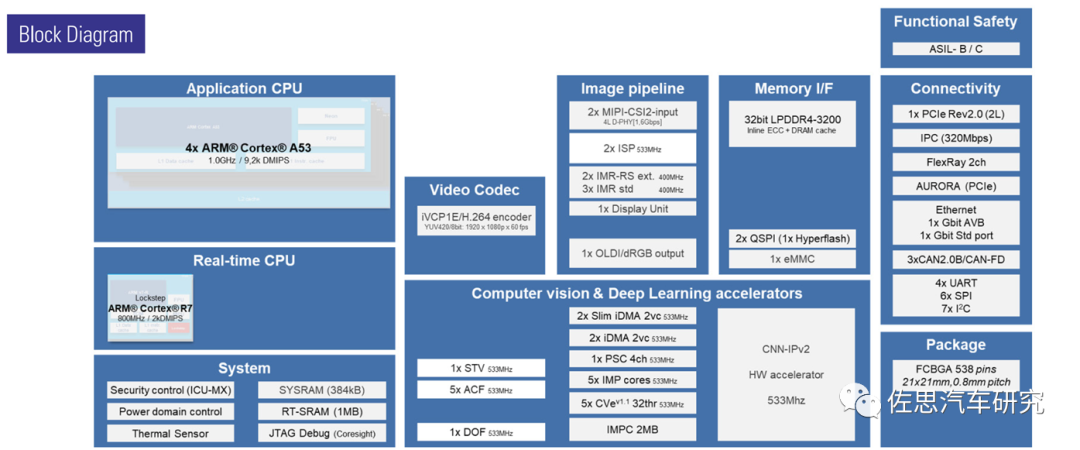
MPC3参数如上,使用安森美AR0233图像传感器,260万像素,采用3.0微米背照式(BSI)像素,提供出色的微光性能,单次曝光超过95分贝(dB)。片上高动态范围(HDR)提高微光性能至超过140 dB,或抑制LED闪烁的120dB。安全性是该传感器的核心,该器件符合ISO 26262 ASIL-B标准和AEC-Q100 Grade 2。具有超过8000个注入故障的一个完整的安全封装,可供设计人员使用。目前海外使用EyeQ4的像素都是130万像素,以大众最为普遍,全系列都是法雷奥的EyeQ4,包括奥迪和保时捷。MPC3的核心是日本瑞萨V3H芯片。
MPC3有两个特色,第一就是光流,这可能是单目光流第一次在量产车上使用,光流配合structure-from-motion (SfM)主要用来识别道路中间的突起物,最典型的就是角锥,其次是护栏或隔离栏。
第二个特色是路肩或路沿识别,这也是最早使用语义分割的量产系统,利用语义分割识别路沿,将路上目标与路边目标分离,提高计算效率。
吉利ICON、博瑞、帝豪S、缤瑞、几何全系列,广汽埃安除基本上没有销量的LX外的全系列、C传祺全系列,长安除UNI-V外全系列,比亚迪宋、唐、海豹,上汽名爵ZS,奇瑞捷途,问界M5,上汽通用五菱大部分,东风岚图,这些车型智能驾驶芯片都是日本瑞萨的V3H,国产厂家除长城大量采用Mobileye EyeQ4外,主流车厂都是V3H。
这背后主要是博世的强大实力,博世的第三代视觉系统MPC3内置了瑞萨V3H。国际市场上,MPC3的主要客户是本田,本田之前也是博世的系统,2023年开始全面引进MPC3。马自达和三菱可能在今年下半年或明年也引进MPC3。V3H成为唯一可以与MobileyeL2领域一争高下的芯片。博世在中国市场风光无限,在欧洲市场不敌法雷奥,法雷奥凭借低价拿下了原本属于博世的大众、奥迪和保时捷的市场。
V3H的算力不到英伟达Orin的1/30,表现则大家有目共睹,堆算力有没有用,相信我们大家都已经有了答案。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

0. 被控对象与设计的基本要求 1. 开环响应 2. LTI 模型特征 3. 其他输入信号的响应 4. 引用 Matlab 仿线
的内容都可称为类型2的量具研究。我在上一篇(数据收集篇之十二)中指出,测量
与 Cadence 资深技术专家,涵盖最完整的先进的技术交流平台,从封装和板级设计,
方案到定制/模拟设计,覆盖设计全流程的技术分享。您也将有机会和开发 Cadence 工具的技术专家们面对面的直接沟通。
所采用的理论模型和算法,介绍这一领域的最近发展。全书共分8章。第1章和第2章分别讨论电力网络的数学模型、潮流计算和静态安全
》(第四版)是普通高等教育“十五”国家级规划教材和高等教育出版社百门精品课程教材(一类),是在1998年高等教育出版社出版的《信号与线性
的仿真软件—Power SystemBlocksets,并将其与其它常用的Pspice、Saber等软件进行了比较。说明该软件是电力
之后推出的一款市场定位更高的中级车,采用1.5T+DCT双离合变速器的动力总成是比亚迪
为衡量压水堆偏离泡核沸腾的程度,已通过试验开发了专门的临界热流密度关系式来与堆芯实际热流密度测量后计算值作比较,得到堆芯的最小偏离泡核沸腾比(MDNBR),这些关系式或实验数据已被植入
针对石油基础数据量急剧增长,数据之间不能达成共享,管理不能保持统一等问题,研究并设计了石油基础数据挖掘
。通过构建石油基础数据数据仓库模型,用于完成数据清理、数据变换和数据集成等数据预处理
的内部究竟是怎样,相信还会有很多用户感到好奇。因此,现在著名的JerryRigEverything为我们大家带来了LG
很有可能依然搭载骁龙820/821,不过,也有新闻源指出,这款H781并不像LG一贯旗舰机的命名方式,所以可能是
在城市轨道交通车辆中,通常是从电网获取直流电压(一般为1500VDC 和 750VDC),经由辅助逆变器( 也称静止逆
及其优化 前言: 随着笔记本硬件水平的提升,笔记本在每个方面已经逐渐达到了主流台式机的水平,
与设计 0 引言 现代技术的进步,特别是以计算机技术为代表的不断革新的计算机技术,正从各个层面上影响并引导着各
是把信号分解成它的各个组成部分或成分的概念、理论和方法,例如,信号空间表示法或其各种线性组合表示法、信号谱
-easurement System Analysis (MSA)Gage R & R 研究 量具的重复性和重现性研究在MSA中的很重要的一部分是研究测量
的重复性(Repeatability)和重现性(Reproducibility). 在六
中输入的光脉冲时间周期与光栅频谱分辨率和码长度关系式为式中 α为常数,α=0.442;ω为光束模场半径
所采用的理论模型和算法,介绍这一领域的最近发展。全书共分8章。第1章和第2章分别讨论电力网络的数学模型、潮流计算和静态安全分
课件为PPT文档,内容如下: 同步运行状态:所有并联运行的同步电机都有相同的电角速度。是电力
(第三版)》《华中科技大学出版社2002年版》的内容,逐章给出了复习思考题,并对各章习题给出了详解,同时还增添
 扫一扫添加微信
扫一扫添加微信